一种可多角度抓取货物的机器人抓手
挂牌价格:
免费
专利类型:
实用新型
专利号:
CN202021659148.3
专利权人:
河南工学院
授权公告日:
2021年03月12日
到期时间:
2030年08月10日
许可期限:
许可期限届满日2024年12月31日
应用领域:
B-作业;运输
许可范围:
全国
挂牌届满日:
2024年12月31日
安全保障
交易保障
完善的资金保障体系确保买卖双方资金安全。
专业团队
专业技术经纪人全程服务跟进,确保对接流畅。
快速响应
专业客服贴心服务,快速响应客户需求。
售后无忧
资质过硬,国家级技术转移服务平台,售后无忧。
详细介绍
本实用新型涉及机器人技术领域,具体地说,涉及一种可多角度抓取货物的机器人抓手,包括壳体,壳体的内部为中空腔体,壳体内安装有第三驱动电机,壳体的前侧壁设有连接杆,第三驱动电机的输出轴端部与连接杆同轴连接,连接杆的末端设有抓手机构,抓手机构包括固定块,固定块的前侧设有两个呈对称分布的夹具,夹具包括固定座,两个固定座相互靠近的一侧处均设有夹板,固定座的内部为中空腔体,固定座内设有压板,压板的靠近夹板的一侧外壁焊接有多个导杆,导杆的末端延伸至固定座的外部且固定在夹板上,该可多角度抓取货物的机器人抓手,可对抓手机构进行多角度调节,便于对不同位置上的货物进行抓取。
交易须知
保障一:对于在本平台交易的交易品,均由我平台验证交易品的有效性;
保障二:客户通过本平台交易,由我平台核实并确保买卖双方身份信息真实有效;
保障三:通过本平台交易,买家支付交易款项给本平台,由本平台监控交易流程,待确认交易完成后支付交易款项给卖家,全程资金代管,保障买卖双方资金安全;
保障四:通过本平台交易,由我平台代办国家手续,办理过程公开透明,进度随时查询,确保交易真实可靠。
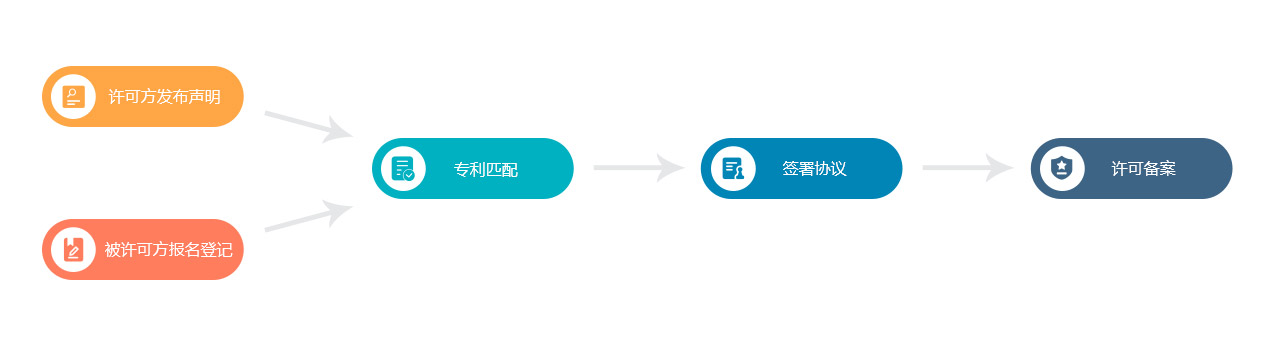
交易流程

知识产权运营中心
微信公众号二维码
微信公众号二维码

知识产权保护协会
微信公众号二维码
微信公众号二维码

运营中心抖音号
抖音二维码
运营中心
微信公众号
知识产权
保护协会